Music
UPROXX Music
All Things Hip-Hop And New Music
UPROXX Indie Mixtape
Indie Music on UPROXX
UPROXX Pop Life
Pop Music on UPROXX
Listen To This
The Music You Need, Right Now
How Silent House Group Helped Tyler The Creator And Doja Cat Make Coachella Moments To Shout About
Lil Uzi Vert And Peso Pluma Brought Drag And Drama To Coachella 2024
How Vampire Weekend Mastered The Five-Albums Test
Film/TV
All Film/TV
UPROXX TV
Driving The Conversations Of Now
UPROXX Movies
Everything New And Important In Film
What To Watch
Know What’s Good In Streaming
‘Inside Out 2’: Everything To Know About The Pixar Sequel Including The New Emotions And Concept Art
Arkasha Stevenson On ‘The First Omen’ And The Scene That Got Her An NC-17
A Lovely Chat With Walton Goggins About ‘Fallout,’ ‘Justified,’ And Being A Solitary Man
Culture
will.i.am Launches FYI, The World’s First AI-Powered Messenger For Creative Collaboration
How Bail Bag Helps The Formerly Incarcerated Get Back On Their Feet
Advice From A Finance Pro For How To Survive (And Thrive) In This Economy
How will.i.am Developed ‘The Formula’ For The Future Of F1
Life/Style
UPROXX Life
Travel, Food, And Drinks On UPROXX
UPROXX Style
Style on UPROXX
The UPROXX Spring 2024 Travel Hot List
The Best Menu Hacks And Secret Menu Items At All The Big Fast Food Chains
‘Loud Budgeting’ Is The Savings Trend Taking Over TikTok In 2024
SNX: This Week’s Best Sneaker Drops Featuring The NOCTA Hot Step 2 Total Orange & Jordan 4 Vivid Sulfur
Sports
All Sports
Dime On UPROXX
NBA on UPROXX
UPROXX Edge
Gaming on UPROXX
UPROXX Brawler
MMA on UPROXX
Jamal Murray On Championship Lessons And What Makes The Nuggets So Tough To Guard Late In Games
Jemele Hill On The Media Response To Caitlin Clark And The Women’s Basketball Boom
We Undersold How Good Victor Wembanyama Would Be As A Rookie
Drinks
All Drinks
Whiskey & Spirits
Whiskey & Spirits On UPROXX
Beer
Beer On UPROXX
Cocktails
Cocktails On UPROXX
The Absolute Best Bourbons Under $125, Ranked
The Absolute Best Scotch Whiskies Under $125, Ranked
We Ranked Salty, Tart Gose Beers To Drink This Spring
This Honey Hop From Our Upcoming Austin Takeover Is The Ideal Bourbon Cocktail For Warmer Weather
Video/Podcasts
Josh Levi Returns To ‘UPROXX Sessions’ With A Swaggering Performance Of ‘She Keeps Comin’
Feminist Synth Lab Is Making Music Accessible For The Marginalized
Paramore’s ‘Misery Business’ Gets Approval From Chlöe And Sexyy Red In The Return Of ‘React Like You Know’
Ice Cube Joins Katty Customs and Just Blaze In The Latest Episode Of ‘Fresh Pair’
…
Follow
YouTube
Instagram
Twitter
Facebook
Flipboard
AppleNews
Email
Search for:
Search
Info
About
Privacy
Terms
Cookies Policy
COOKIES SETTINGS
Olivia Munn Talks Representation And Being A Woman Who Loves (But Isn't Great At) Gaming
Reviews
‘Assassin’s Creed: Valhalla’ Doesn’t Throw a Strong Punch
December 1, 2020
by:
AJ Lodge
In Praise Of Anti-Realism In Video Games
December 1, 2020
by:
Kayleigh Donaldson
The Loot
WWE’s Xavier Woods Is Opening Doors With His Move To G4
December 1, 2020
by:
Raj Prashad
Travis Scott Is Reportedly In Talks To Create His Own PlayStation Game
November 30, 2020
by:
Carolyn Droke
‘Fallout’ Star Ella Purnell Fully Admits That She’s ‘Not A Gamer’ After Trying To Wrap Her Head Around The Game
April 12, 2024
by:
Mike Redmond
Ella Purnell On ‘Fallout’ And Why She Gravitates Toward Playing Survivors
April 10, 2024
by:
Jessica Toomer
Jack Black Really Wants A ‘Grand Theft Auto’ And/Or ‘Red Dead Redemption’ Movie
April 2, 2024
by:
Josh Kurp
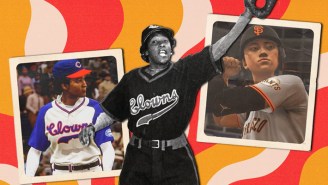
‘MLB The Show 24’ Is Finally Celebrating Women In Baseball
March 29, 2024
by:
Jessica Toomer
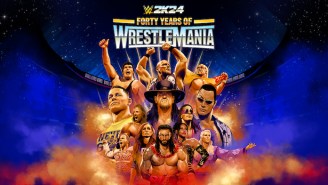
‘WWE 2K24’ Is A Winner In A Series Brought Back To Life
March 4, 2024
by:
Raj Prashad
The ‘Borderlands’ Trailer Delivers A Badass Cate Blanchett And Reigning Video-Game Movie King Jack Black As The Robot Mascot
February 21, 2024
by:
Kimberly Ricci
T-Pain Tells Us Why Your Favorite Artist Is Probably Gaming Too
by:
Martin Rickman
Jordan Fisher Really Wants You To Get Into 'Overwatch' On Twitch
by:
Ryan Nagelhout
Streetwear And Luxury Brands Are The Future Of Gaming Fashion
by:
Ryan Nagelhout
From Playing In The Overwatch League To Casting It Jacob "Jake" Lyon Does Not Feel The Pressure
by:
Chris Barnewall
Travis Kelce Loves 'Every Bit' Of 'Madden NFL 21's New Game Mode 'The Yard'
by:
Bill DiFilippo
Michael B. Jordan Wants To Help 'Usher In The Next Generation Of Gamers'
by:
Martin Rickman
Vince Staples On Why 'It's Good For The Kids To See' Rappers And Athletes Gaming
by:
Martin Rickman
Soha El-Sabaawi Is Reprogramming Gamer Culture To Be More Inclusive
by:
Jessica Toomer
‘Madden,’ ‘NBA 2K’ And The Future Of Sports Video Games
by:
Bill DiFilippo
and
Ryan Nagelhout